Abstract
Large language models (LLMs) offer robots richer task understanding and stronger adaptability, showing substantial potential for coordinating multi-robot systems in long-horizon, heterogeneous tasks. Despite this promise, several key challenges remain underexplored:
(1) Centralized LLM schedulers struggle to scale with increasing team sizes and environmental complexity. Even with extended context windows, models cannot reliably attend to all salient information, and long-context approximations degrade reasoning quality;
(2) Existing task formulations insufficiently consider dynamic settings, whereas robust adaptation to evolving task conditions is essential for real-world deployment;
(3) Domain-specific data scarcity limits specialized reasoning ability, making proprietary general-purpose models inefficient when applied to expert robotic tasks.
To address these limitations, we propose DynaHMRC, a decentralized framework in which each robot operates as a role-aware LLM agent. This design alleviates the single-model context bottleneck and naturally scales with team size. Collaboration is organized into a four-stage closed-loop process, including self-description, task allocation with leadership bidding, leader election, and reflective execution, supported by executable robot interfaces. We further develop a comprehensive benchmark spanning three task families, four dynamic variations, and six team configurations to systematically study dynamic task modeling. Additionally, we conduct an empirical analysis to guide the construction of domain-specific expert datasets and fine-tune pretrained LLMs to enhance specialized competence. Experiments show that, compared with strong baselines, DynaHMRC achieves higher success rates with fewer action and communication steps while maintaining strong scalability as team size grows.System Overview
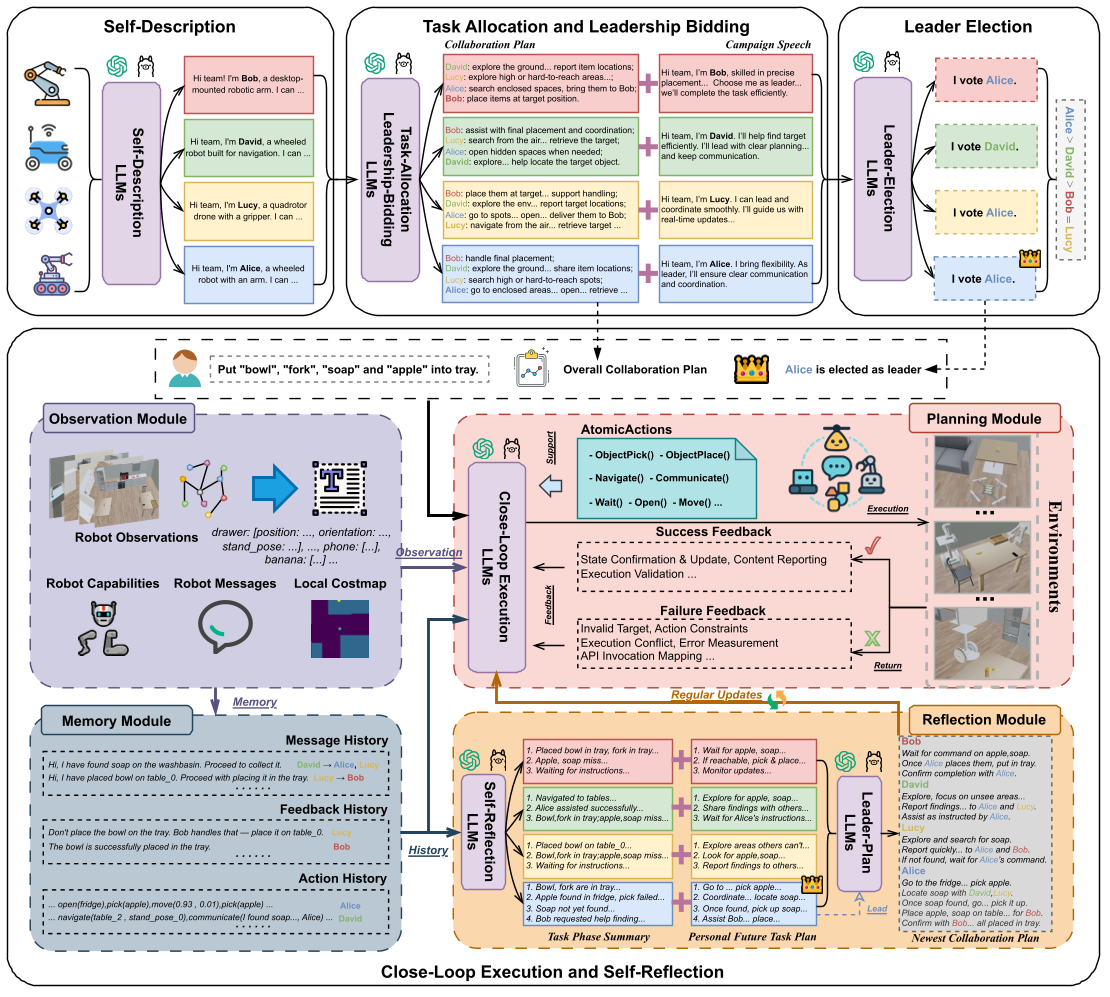
Overview of the proposed decentralized multi-robot collaboration framework. In this system, each robot functions as a role-aware LLM agent equipped with its own perception, memory, and action interfaces. During self-description and task allocation, robots announce their capabilities and bid for leadership; a leader is then elected through distributed voting and develops a global collaboration plan. During execution, robots continuously perceive the environment, update their memories, and carry out atomic actions (e.g., navigation, picking, placing, communication) while exchanging status messages. Feedback from action outcomes drives dynamic adaptation, allowing robots to correct errors, resolve conflicts, and adjust their collaboration strategies. Finally, through self-reflection, each robot summarizes its progress and formulates future task plans, completing the iterative loop that enables robust collaboration across heterogeneous mobile, manipulation, and aerial robots.